mirror of
https://github.com/crawlab-team/crawlab.git
synced 2026-01-23 17:31:11 +01:00
47 lines
3.4 KiB
Markdown
47 lines
3.4 KiB
Markdown
## 节点通信
|
||
|
||
这里的通信主要是指节点间的即时通信,即没有显著的延迟([爬虫部署](./SpiderDeployment.md)和[任务执行](./TaskExecution.md)是通过轮训来完成的,不在此列)。
|
||
|
||
通信主要由Redis来完成。以下为节点通信原理示意图。
|
||
|
||
|
||
|
||
各个节点会通过Redis的`PubSub`功能来做相互通信。
|
||
|
||
所谓`PubSub`,简单来说是一个发布订阅模式。订阅者(Subscriber)会在Redis上订阅(Subscribe)一个通道,其他任何一个节点都可以作为发布者(Publisher)在该通道上发布(Publish)消息。
|
||
|
||
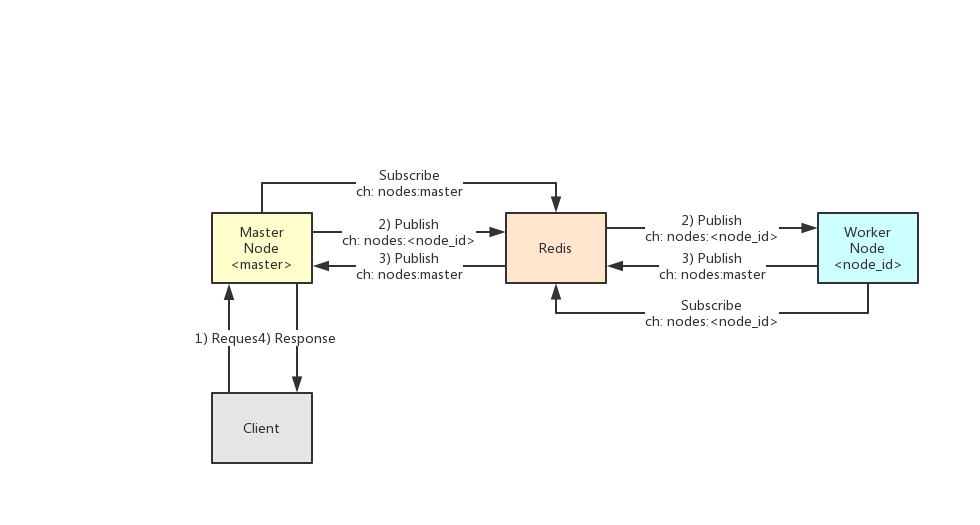
在Crawlab中,主节点会订阅`nodes:master`通道,其他节点如果需要向主节点发送消息,只需要向`nodes:master`发布消息就可以了。同理,各工作节点会各自订阅一个属于自己的通道`nodes:<node_id>`(`node_id`是MongoDB里的节点ID,是MongoDB ObjectId),如果需要给工作节点发送消息,只需要发布消息到该通道就可以了。
|
||
|
||
一个网络请求的简单过程如下:
|
||
1. 客户端(前端应用)发送请求给主节点(API);
|
||
2. 主节点通过Redis `PubSub`的`<nodes:<node_id>`通道发布消息给相应的工作节点;
|
||
3. 工作节点收到消息之后,执行一些操作,并将相应的消息通过`<nodes:master>`通道发布给主节点;
|
||
4. 主节点收到消息之后,将消息返回给客户端。
|
||
|
||
不是所有节点通信都是双向的,也就是说,主节点只会单方面对工作节点通信,工作节点并不会返回响应给主节点,所谓的单向通信。以下是Crawlab的通信类型。
|
||
|
||
操作名称 | 通信类别
|
||
--- | ---
|
||
获取日志 | 双向通信
|
||
获取系统信息 | 双向通信
|
||
取消任务 | 单向通信
|
||
通知工作节点向GridFS获取爬虫文件 | 单向通信
|
||
|
||
### `chan`和`goroutine`
|
||
|
||
如果您在阅读Crawlab源码,会发现节点通信中有大量的`chan`语法,这是Golang的一个并发特性。
|
||
|
||
`chan`表示为一个通道,在Golang中分为无缓冲和有缓冲的通道,我们用了无缓冲通道来阻塞协程,只有当`chan`接收到信号(`chan <- "some signal"`),该阻塞才会释放,协程进行下一步操作)。在请求响应模式中,如果为双向通信,主节点收到请求后会起生成一个无缓冲通道来阻塞该请求,当收到来自工作节点的消息后,向该无缓冲通道赋值,阻塞释放,返回响应给客户端。
|
||
|
||
`go`命令会起一个`goroutine`(协程)来完成并发,配合`chan`,该协程可以利用无缓冲通道挂起,等待信号执行接下来的操作。任务取消就是`go`+`chan`来实现的。有兴趣的读者可以参考一下[源码](https://github.com/tikazyq/crawlab/blob/master/backend/services/task.go#L136)。
|
||
|
||
### Redis PubSub
|
||
|
||
这是Redis版发布/订阅消息模式的一种实现。其用法非常简单:
|
||
1. 订阅者利用`SUBSCRIBE channel1 channel2 ...`来订阅一个或多个频道;
|
||
2. 发布者利用`PUBLISH channelx message`来发布消息给该频道的订阅者。
|
||
|
||
Redis的`PubSub`可以用作广播模式,即一个发布者对应多个订阅者。而在Crawlab中,我们只有一个订阅者对应一个发布者的情况(主节点->工作节点:`nodes:<node_id>`)或一个订阅者对应多个发布者的情况(工作节点->主节点:`nodes:master>`)。这是为了方便双向通信。
|
||
|
||
参考:https://redis.io/topics/pubsub
|